
Host
Suspendisse tristique vehicula ante tortor, ut auctor diam ornare ut. Pellentesque et ex et dolor tempor suscipit. Phasellus vel orci vel orci tincidunt interdum. Nunc quis viverra metus. In cursus tincidunt. Nam consequat nibh justo, non sollicitudin sem placerat vitae.
Client & task
Suspendisse tristique vehicula ante tortor, ut auctor diam ornare ut. Pellentesque et ex et dolor tempor suscipit. Phasellus vel orci vel orci tincidunt interdum. Nunc quis viverra metus. In cursus tincidunt. Nam consequat nibh justo, non sollicitudin sem placerat vitae.
Objectives
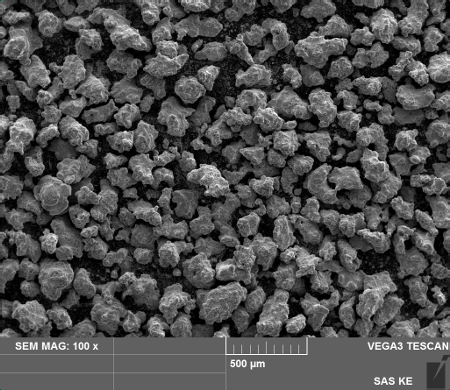
Modern grid-connected converters with LCL filters operate under fast-switching conditions where magnetic losses and nonlinearities significantly affect system performance. Traditional control algorithms often neglect these effects, resulting in oversized passive components, higher switching losses, and reduced efficiency. Dynamic hysteresis models (DHMs) capture the time-dependent, nonlinear behaviour of magnetic materials and offer the potential to integrate material-level physics directly into controller design.
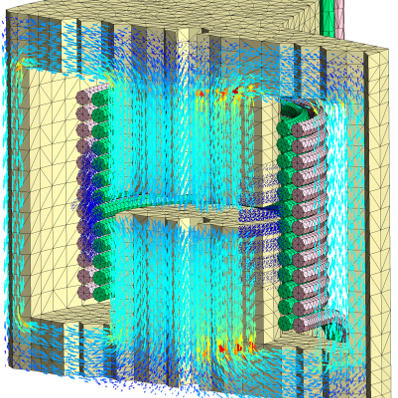
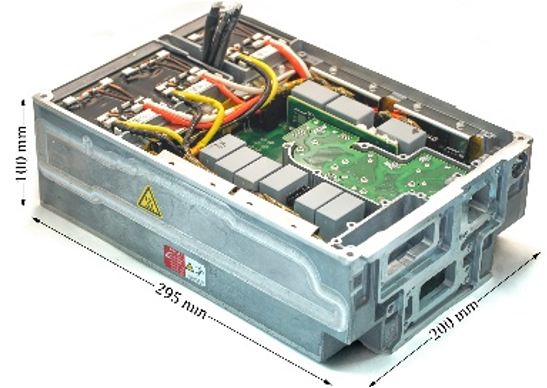
By leveraging DHMs, controllers can account for real-time core losses and nonlinearities, enabling more compact and efficient filter design, improved damping, and higher overall system efficiency. This project integrates DHMs into both frequency-domain and time-domain control strategies, developing advanced linear and nonlinear controllers that reduce hardware footprint, lower losses, and maintain robust performance under realistic operating conditions. Experimental validation ensures that model-based control strategies translate into tangible improvements in industrial converter applications.
Objectives 1
Integrate dynamic magnetic hysteresis models into control techniques for grid-connected converters with LCL filters.
Objectives 2
Develop and implement a frequency-domain control scheme based on loss models: (i) Linear controller design using proportional-integral controllers. (ii) Active damping mechanism design. (iii) Identification of design limitations.
Objectives 3
Develop and implement a time-domain control scheme using loss models, designing a nonlinear controller based on constrained optimal control with active damping.
Objectives 4
Experimentally validate and compare both control algorithms.
Expected Results
Lorem ipsum dolor sit amet, consectetur adipiscing elit. Phasellus et massa nec arcu efficitur ultrices. Proin laoreet neque eu ligula pretium, vel congue urna faucibus. Integer ut felis dui. Phasellus tincidunt lacus ac ex laoreet, ac ultricies quam condimentum. Vestibulum ante ipsum primis in est.
67%
Reduction of the filter size (i.e., reduction of the hardware and, thus, overall system cost).
260%
Reduction of the switching and power losses (i.e., increased system efficiency, and, thus, energy savings).
Sed fringilla gravida lorem, id rhoncus justo egestas sed. Nulla sagittis vel ante sit amet neque non tellus interdum tincidunt eget eu odio. Awesome!
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}